Model-based Code Generation from CHARON |
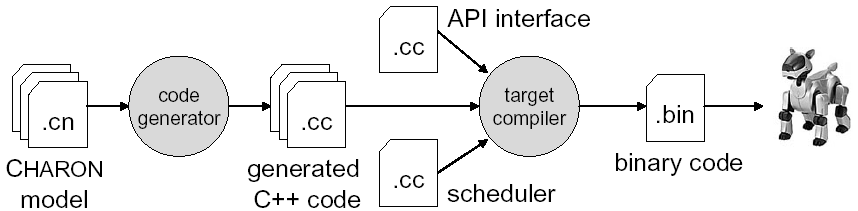
Model-based implementation of embedded software is a promising approach to improving reliability and development cost of embedded systems. Code generation is the last and the most challenging task of automatic synthesis of implementation from formal specification. We are studying various issues of transforming hybrid system models to digital programs, including platform-dependent adaptation and optimization, real time scheduling, and precise event detection. As a case study, we are implementing a CHARON-to-C++ code generator targeted to Sony’s quadruped robot dog, AIBO. Current implementation demonstrates that a simple CHARON specification in the form of a small set of differential equations is enough to describe complex behavior of robots such as getting up and down that would otherwise require tedious C++ programming to describe small amount of movement of every joint at every time step.
· Dr. Jesung Kim (Former Member)
· Dr.Franjo Ivancic (Former Member)
Our current experimental platform consists of AIBO ERS-210A/N and a preliminary implementation of the code generator.
We are experimenting with CHARON models for various behavior of the dog, such as wagging the tail, tracking the ball, standing up, and so on. We are also interested in verifying whether the CHARON model is subject to invariant violations due to non-zero processing delay of the hardware platform that is not explicitly specified in the model. Currently, we are considering the predicate abstraction technique for the verification. Finally, we consider the problem of generating resource-aware code from hybrid system models that preserves the switching semantics of the model. Our approach starts by incorporating a resource model of the target platform into the hybrid systems model of the application. Code generation techniques are then applied to the integrated model to produce parameterized code. These parameters are specified at runtime by monitoring the state of the available resources. To guarantee the switching semantics of the model in the code, we have to ensure that there are no faulty or missed transitions. To prevent faulty transitions, we propose to instrument the guards and invariants for numerical and timing-induced errors. Insufficient sampling of instrumented guards can lead to missed transitions. To detect such a possibility, we develop a sufficient condition based on the periods of execution of the agents. This condition is used to build an algorithm that chooses optimal periods of execution so as to meet the resource constraints while providing semantic guarantees. We are currently working on an implementation of the proposed framework from hybrid systems models specified in CHARON.
[LCTES03]
Generating Embedded
Software from Hierarchical Hybrid Models, Rajeev Alur, Franjo
Ivancic, Jesung Kim, Insup Lee and Oleg Sokolsky, in
Proceeding of ACM SIGPLAN Languages, Compilers, and Tools for
Embedded Systems (LCTES'03), San Diego, California, June 11-13,
2003
Abstract
- Full
Postscript File - PDF
File
[RTAS03]
Modular Code Generation from Hybrid Automata
based on Data Dependency, Jesung Kim and Insup Lee, in
Proceedings of The 9th IEEE Real-Time and Embedded Technology and
Applications Symposium (RTAS 2003), Washington, DC, May 27-30,
2003,
Abstract
- Full
Postscript File - PDF
File
[HSCC04]
Sound Code Generation from Communicating Hybrid
Models, Yerang Hur, Jesung Kim, Insup Lee, and Jin-Young Choi
in Hybrid Systems: Computation and Control: 7th International
Workshop, 2004 (HSCC 2004), pages 432-447.
PDF
File
[ISORC05]
Code Generation from Hybrid Systems Models for
Distributed Embedded Systems, Madhukar Anand, Jesung Kim and Insup
Lee, in Proceedings of IEEE International Symposium on
Object-oriented Real-time Distributed Computing (ISORC), 2005, pages
166 - 173.
PDF
File
[EMSOFT05]
Distributed-Code Generation from Hybrid Systems
Models for Time-delayed Multirate Systems, Madhukar Anand, Sebastian
Fischmeister, Jesung Kim and Insup Lee, in Fifth ACM
International Conference on Embedded Software (EMSOFT), 2005, pages
210-213
PDF
File